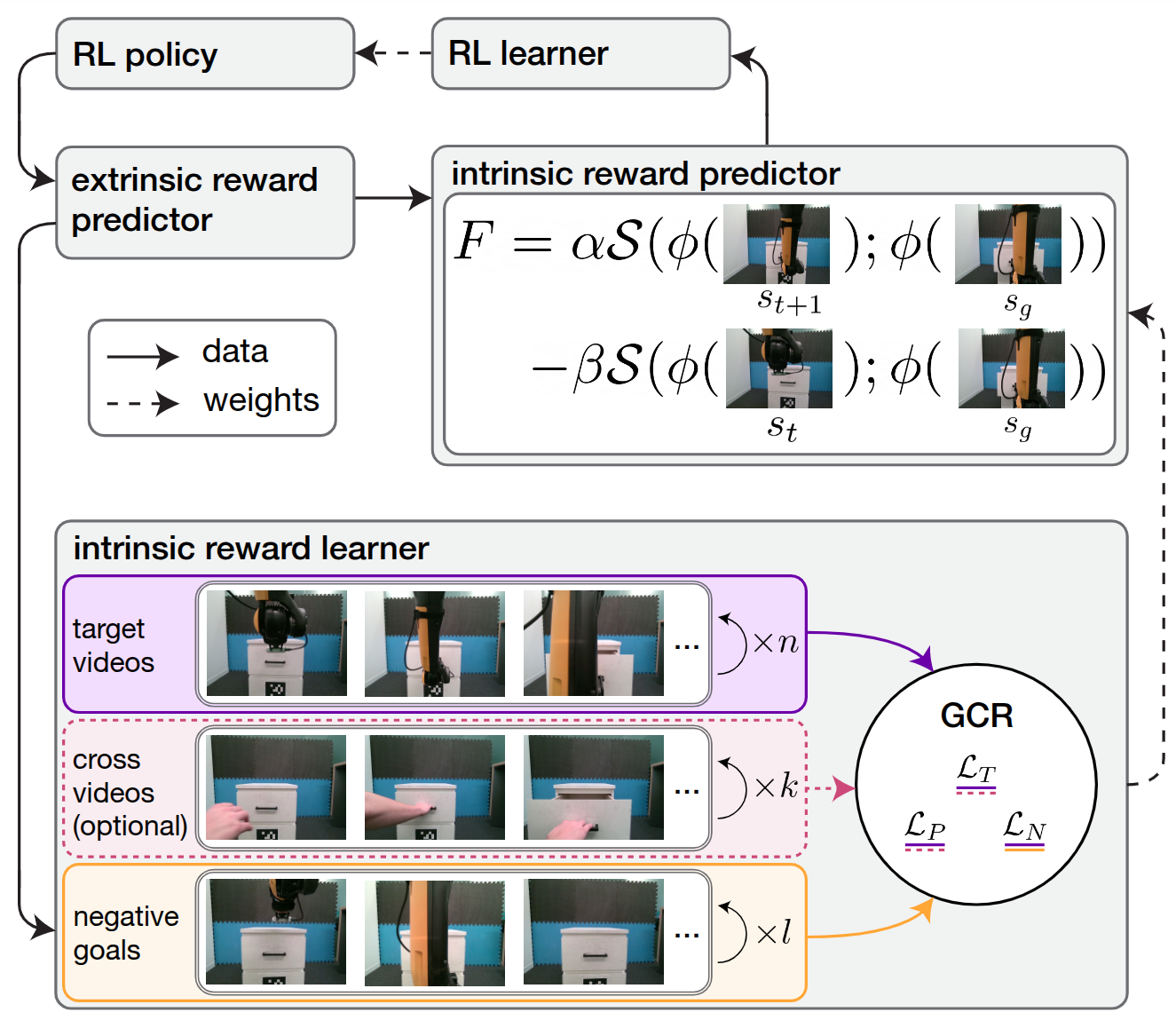
Reinforcement Learning (RL) has the potential to enable robots to learn from their own actions in the real world. Unfortunately, RL can be prohibitively expensive, in terms of on-robot runtime, due to inefficient exploration when learning from a sparse reward signal. Designing dense reward functions is labour-intensive and requires domain expertise. In our work, we propose GCR (Goal-Contrastive Rewards), a dense reward function learning method that can be trained on passive video demonstrations. By using videos without actions, our method is easier to scale, as we can use arbitrary videos. GCR combines two loss functions, an implicit value loss function that models how the reward increases when traversing a successful trajectory, and a goal-contrastive loss that discriminates between successful and failed trajectories. We perform experiments in simulated manipulation environments across RoboMimic and MimicGen tasks, as well as in the real world using a Franka arm and a Spot quadruped. We find that GCR leads to a more-sample efficient RL, enabling model-free RL to solve about twice as many tasks as our baseline reward learning methods. We also demonstrate positive cross-embodiment transfer from videos of people and of other robots performing a task.
@inproceedings{biza25onrobot,
author = {Ondrej Biza and
Thomas Weng and
Lingfeng Sun and
Karl Schmeckpeper and
Tarik Kelestemur and
Yecheng Jason Ma and
Robert Platt and
Jan{-}Willem van de Meent and
Lawson L. S. Wong},
title = {On-Robot Reinforcement Learning with Goal-Contrastive Rewards},
booktitle = {ICRA},
year = {2025}
}